この記事をまとめると
■ここ最近で自動運転のトレンドが変わった
■かつての自動運転はカメラ・ミリ波レーダー・ライダーなどを使用したものだった
■現在の自動運転はAIの認識により車両を制を処理する方法が主流となりつつある
日進月歩で進化する自動運転技術
この1〜2年で、潮目が大きく変わった。自動運転に長らく関係してきた技術者や学術関係者と意見交換していて、最近よく耳にする表現だ。
 ウェイモの自動運転実験車両画像はこちら
ウェイモの自動運転実験車両画像はこちら
時計の針を少し戻すと、グローバルで自動運転に大きな注目が集まり始めたのは2010年代半ばだった。アメリカを中心に、欧州と連携して自動運転の社会実装を進める動きが活発化した。米国防高等研究計画局(DARPA:ダーパ)が開催した自動運転に関する競技に参加した画像認識に関する研究者らが、米シリコンバレーのIT系企業や欧州系の大手自動車部品メーカーなどに転じて自動運転の実用化を目指し始めたのだ。
この時点では、日本は「世界の流れに対して1周遅れ」という状態だった。そのため、日本政府は内閣府が行う次世代技術の研究開発プロジェクトである、SIP(戦略的イノベーション創造プログラム)のひとつに自動運転を選び、産学官連携によるオールジャパン体制で自動運転の早期社会実装にのぞんだ。
 SIP(戦略的イノベーソン創造プログラム)のロゴ画像はこちら
SIP(戦略的イノベーソン創造プログラム)のロゴ画像はこちら
都合9年半にわたるSIP自動運転プロジェクトでは、技術開発、法整備、国際連携、人材育成などで多くの実績を残した。また、日系自動車メーカー各社はSIPを活用しながら、自社の自動運転技術を磨いていった。
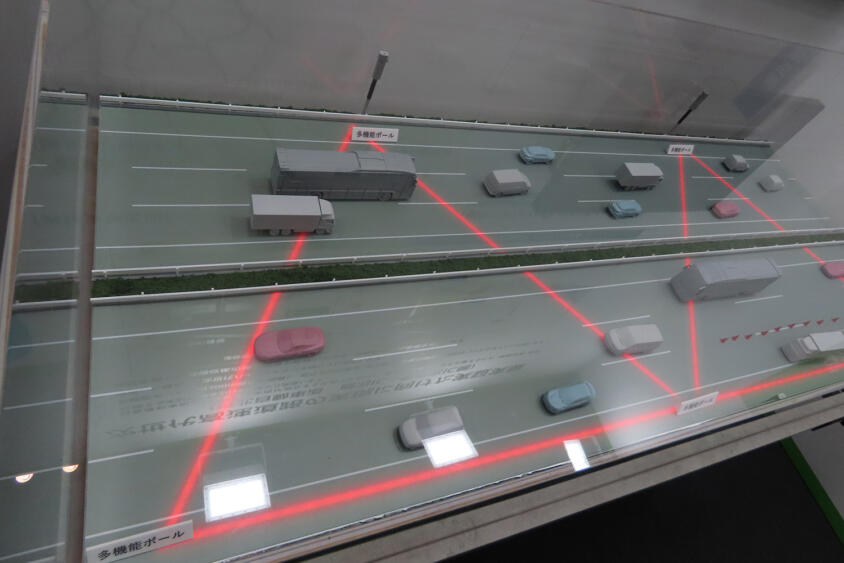
こうした自動運転技術では、専用の測定車両を使い高精度3次元地図を作成し、その基礎データを踏まえて、走行する自車に搭載するカメラ、ミリ波レーダー、ライダーなどで周囲の状況を把握する手法を取ってきた。これを一般的に「ルールベース」と呼ぶ。
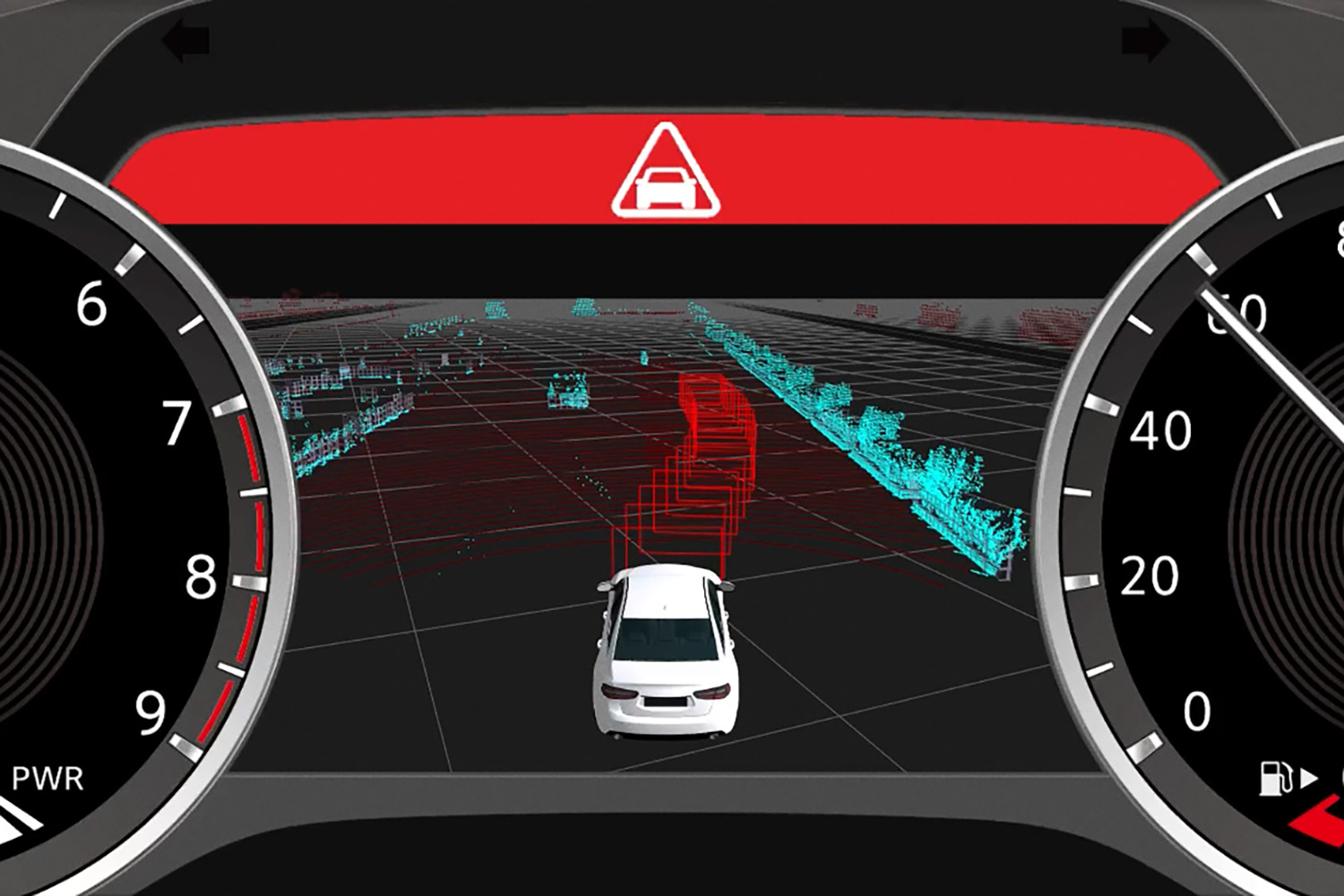 ライダーによるセンサリング画像はこちら
ライダーによるセンサリング画像はこちら
国土交通省が直近で作成している資料「自動運転の実現に向けたインフラ連携の取組について」には、ルールベースに対して次のような記載がある。
〜従来のOEM(自動車メーカー)等が開発を進めてきた、センサーや高精度3次元地図が必要となるルールベースの自動運転モデルに加え、近年では、E2E(エンド・トゥ・エンド)のAIベースの自律型自動運転モデルの開発が活発化〜
その上で、ルールベースの特徴は「プログラムされた交通ルールや運転ルールに基づく」ために判断根拠が明確だが、まれに発生する事象に完全に対応するプログラム作成は困難だという認識を示している。また、高精度3次元地図が整備されたエリアでの走行に限定されてしまう。
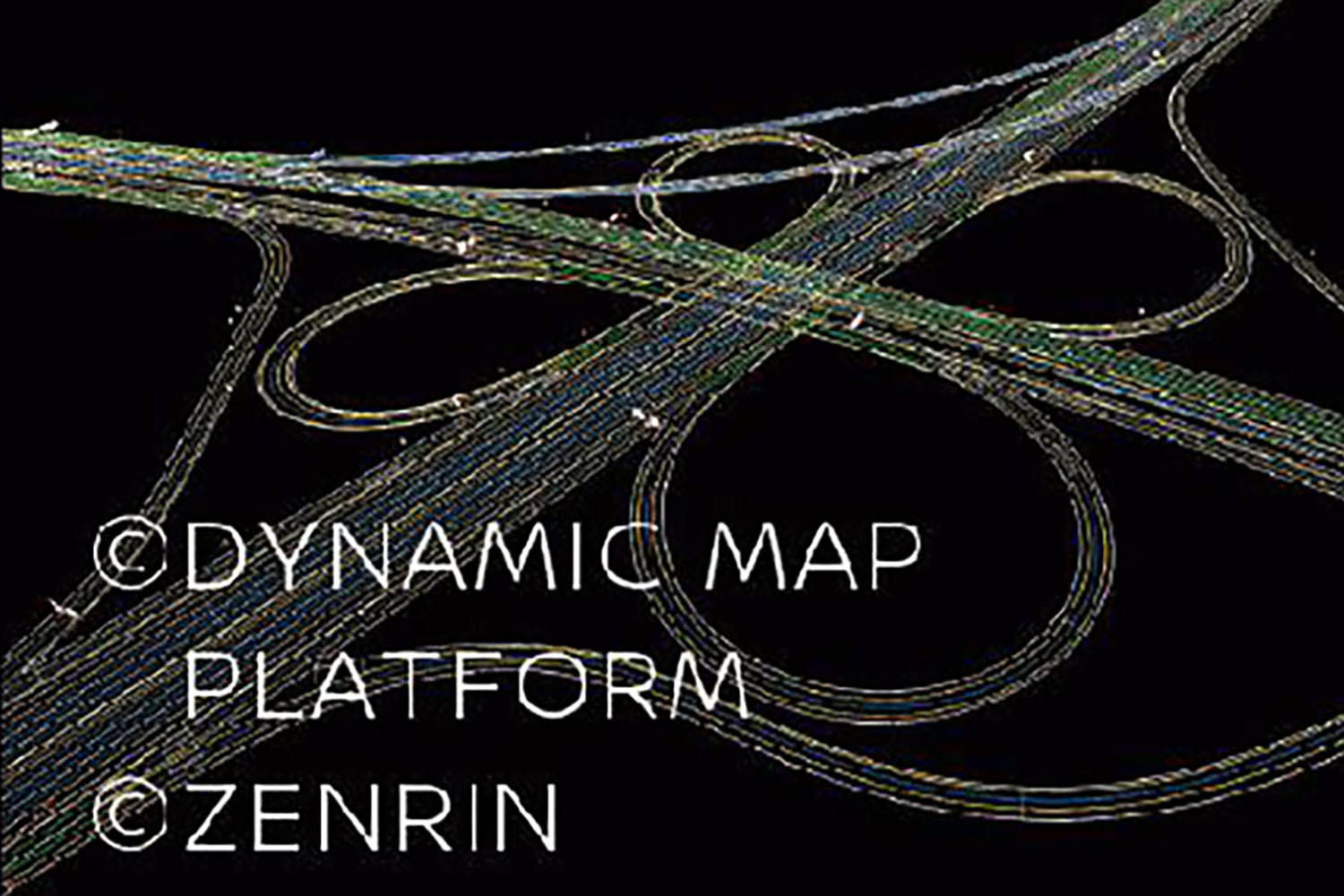 高精度3次元地図画像はこちら
高精度3次元地図画像はこちら
一方で、E2E AIベースの特徴は、「AI(人工知能)モデルで認識が制御を処理するため、判断根拠がブラックボックス化している」と説明。その上で、ミリ波レーダー、ライダー、そして高精度3次元地図を必ずしも必要としないとしている。つまり、走行エリアが限定されない。
ルールベースと、E2E AIベースは一長一短があるものの、欧米や中国ではE2E AIベースの自動運転が台頭しており、日本でも自動車メーカーを中心にそうしたトレンドをキャッチアップしようという動きが加速している状況だ。