次第にオンロードにフォーカスした4WDが増えていった
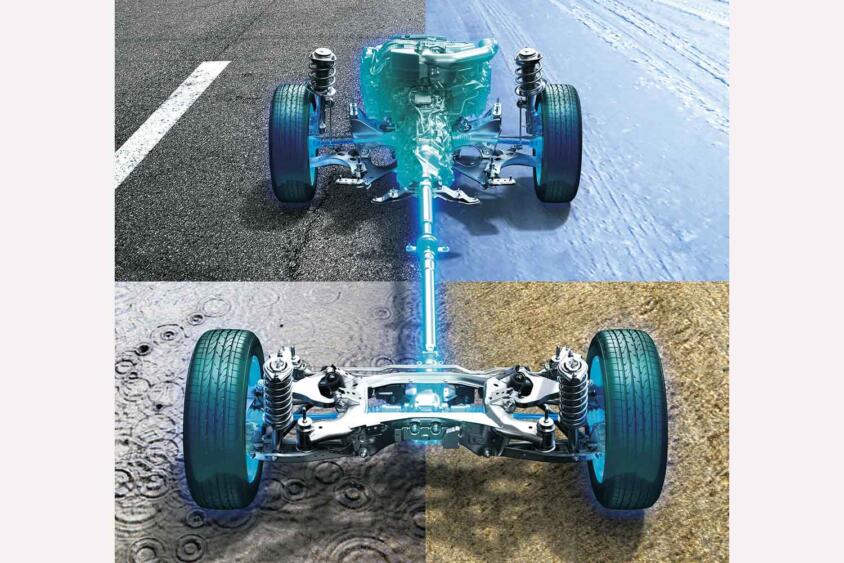
ところが、4WD方式は、車体4角にあるタイヤに駆動力を与えて車体を走らせるため、車両挙動の安定性(スタビリティ)が高くなるという利点、美点があることに気付きはじめることになる。日常ユースの乗用車を4WD化すれば、スタビリティが高くなることで雨天や強風下での高速走行の安定性が大きく増し、外乱に対して運転操作に神経質になることもなく、車両全体でのセーフティマージンをワンランク高くとることができる。
 高速走行する4WD車画像はこちら
高速走行する4WD車画像はこちら
これがフルタイム4WDの発想で、4WDを乗用車の実用メカニズムとして積極的に取り入れる姿勢を見せたのがスバルとアウディだった。では、どうやって4WD化によって生じる前後の回転差に対処したのだろうか。カギは左右輪の回転差処理にあった。
エンジンからの出力を前後輪の駆動軸に伝える途中にデフを配置したのである。もちろん、前後輪軸のそれぞれにも左右間の回転差に対処するデフが設けられているので、前後間に設けられるデフにはセンターデフという名称がつけられた。
 センターデフとリヤデフの締結をコントロールできる4WD車画像はこちら
センターデフとリヤデフの締結をコントロールできる4WD車画像はこちら
ところで、エンジンと前後軸間の駆動力伝達系に配置されるセンターデフだが、いくつかのタイプが考えられ実用化されている。まず、ベーシックなタイプが機械式のセンターデフだ。左右輪の回転差を処理するために設けられたデファレンシャルと基本的に同じ機構で、ベベルギヤとリングギヤの組み合わせによって回転差を処理する機構だ。
同じ機械式でも、プラネタリー(遊星)ギヤを使う方式もある。トルクコンバーターと組み合わせたステップ式変速機のATでも使われるメカニズムで、前後の回転差に対処しながらギヤ比の設定(シングルピニオン式=サンギヤとリングギヤの歯数比率)によって前後の駆動力配分を変えることもできるものだ。
お手軽という表現もできるが、考え方によってはもっとも合理的な方式がVCU(ビスカスカップリング)式だ。封入したシリコンオイルのせん断抵抗を利用したデファレンシャル機構で、通常走行では機能せず2輪駆動として走らせているが、低μ路などで前後輪間で回転差が生じるとVCUが差動して被駆動輪(大半の場合、FF方式の後輪)に駆動力を伝える方式だ。
 雪上を走行するFFベースの4WD車画像はこちら
雪上を走行するFFベースの4WD車画像はこちら
動力伝達の反応は瞬時のものではなく、大トルクに向いた方式ともいい難いのだが、ユニットが軽量コンパクト性、低コスト性に優れるため、2WDを簡易に廉価で4WD化できる実用面に優れた特徴をもっている。
逆に、多板式クラッチによって構成されたセンターデフ機構もある。日産スカイラインGT-R(R32型で初採用)が採用したマルチプレート式で、通常は前後0対100の駆動力配分でFRとして機能。しかし、後輪がスリップした場合、そのスリップを検知して前輪に駆動力を伝えるシステムで、前後駆動力配分は0対100から最大50対50にまで連続可変で対応する優れたシステムだ。
 日産スカイラインGT-R(R32)のフロントスタイリング画像はこちら
日産スカイラインGT-R(R32)のフロントスタイリング画像はこちら
もちろん、舗装路走行から低μ路走行にまで対応したシステムだが、成り立ちを考えると舗装路走行で路面状況の変化(ドライ〜ウエット)に対応しながら最大限速く走ることを目的としたスポーツ4WDに向いたシステムと考えてよい。各種センサーを多用、電子制御を活用した高価で複雑なシステムでもある。
現状の4WDシステムを整理すると、クロスカントリー/オフロード4WDに適したパートタイム式と、スタビリティの高さに着目した常時4WD走行のフルタイム式のふたつがあり、パートタイム式4WDがもつ旋回時の前後回転差によるギクシャクした動きの発生を抑えるため、回転差に対処するセンターデフが必要不可欠な装置となっている。