今後のスタンダードになる技術を先行試乗
■インホイール・モーター
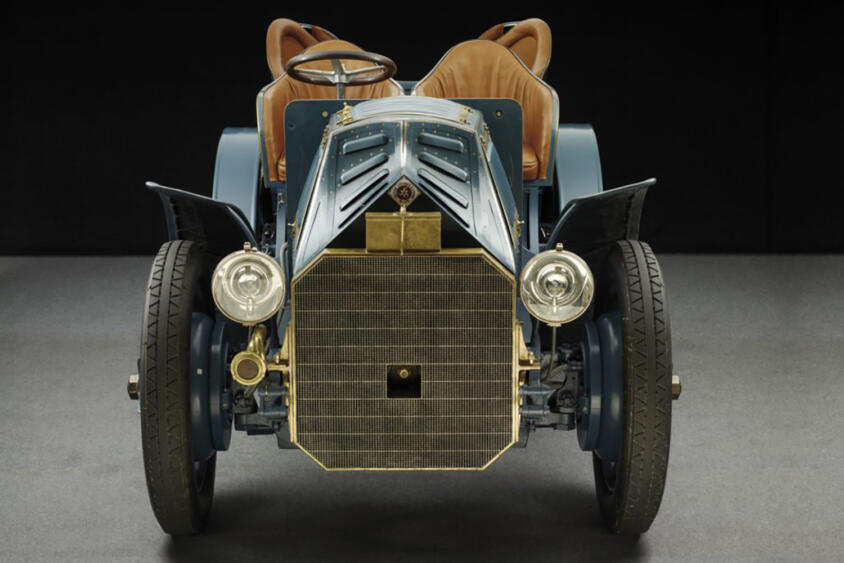
歴史を紐解けば、1900年のパリ博覧会でポルシェ(創始者)が発表したローナーポルシェはシリーズ・ハイブリットにインホイール・モーターを搭載していた。以来100年以上の時が経ってしまったが、インホイール・モーターの実用化は遠かった。最近では電動クルマ椅子などに使われたケースがあるものの、乗用車への実用化はまだ達成できていない。筆者は10年くらい前に三菱自動車のテストコースで同社のプロトタイプに試乗したことがあるが、熱の問題やパッケージなどから実用化には至っていない。
 Astemoが開発中のインホイール・モーターの独創性に日本の技術力を見た画像はこちら
Astemoが開発中のインホイール・モーターの独創性に日本の技術力を見た画像はこちら
そういえば、今年のJMS2025では、三菱自動車のコンセプトカーがフロントにインホール・モーターを採用していた。とはいえ実用化は未定とのこと。この手のクルマで市販化を先に公表したのは、2027年に発売するとしているEV、「Renault 5 Turbo 3E」である。どのメーカーが早く実用化するのか、世界のサプライヤーの研究開発にかかっている。
 Renault 5 Turbo 3E画像はこちら
Renault 5 Turbo 3E画像はこちら
今年のJMS2025のアステモブースにはインホイール・モーターが展示されていたが、筆者は10月に開催されたアステモのテクノロジー・ワークショップで量産を前提としたインホイール・モーターを搭載するクルマに試乗ですることができた。
昨年に続いて2度目のドライブだが、前回は時速30キロくらいが限界であったが、今回は時速60キロくらいまで使えるようになった。課題は熱問題であるが、冷却性能も進化し、四輪インホイール・モーターの可能性を体験できた。
 Astemoのインホイールモーター開発用実験車両画像はこちら
Astemoのインホイールモーター開発用実験車両画像はこちら
四輪にインホイール・モーターを装備すると、前後モーターを正転・逆転で制御することで、なんとサスペンションが伸び・縮みする。つまり車高が自在に変化するわけだ。また、外輪のタイヤにトルクをかけると旋回モーメントが発生し、ステアリングを補佐する機能が可能だ。これが実現すると、クルマの運動性能が破壊的に進化することは明白だ。
 Astemoのインホイールモーター開発用実験車両画像はこちら
Astemoのインホイールモーター開発用実験車両画像はこちら
■インホイール・モーターは統合制御で走る
「アステモは幅広い技術領域をもっているので、単なるインホイール・モーターでは面白くない」と以前にコメントしたことがあったが、今回はマウスのようなハンドルでバイワイヤー化したステアリング機構を統合されたプロトタイプだった。丸いハンドルから片手で操作できるマウスは慣れると使いやすい。
 Astemoのインホイールモーター開発用実験車両画像はこちら
Astemoのインホイールモーター開発用実験車両画像はこちら
このインホイール・モーターが実用化される2030年代は、NOA(Navigation on Autonomous)※2がきっと実用化しているはずなので、市街地でもハンズオフで目的地まで行くことができるだろう。ハンドルは一見便利に思えるが、衝突時は乗員に加害する部品でもある。
 Astemoのインホイールモーター開発用実験車両画像はこちら
Astemoのインホイールモーター開発用実験車両画像はこちら
ステアリングやブレーキもバイワイヤー化するなら、インホイール・モーターのBEVは時代を先取りすることができる。今回発表された技術はクラウド学習によるシャシーの統合制御やレアメタル不要のモーター技術など、さらに深堀してリポートする価値がある内容だった。
紙面の都合で今回はインホイール・モーターを取り上げたが、続編で残りの技術も紹介していきたい。ホンダからの転出者も多いので清水からの激励としては、「創造の担い手」になってほしい。
 Astemoのインホイールモーター開発用実験車両画像はこちら
Astemoのインホイールモーター開発用実験車両画像はこちら
※2:NOA(Navigation on Autonomous)レベル2のADASだがより高度な運転支援を行う