この記事をまとめると
■ホンダの「2050年交通事故死者ゼロに向けた、先進の将来安全技術」を体験
■クルマ同士はもちろん歩行者とも危険をネットワークで共有するサーバー構築を目指す
■体験会の締めは進化した倒れないバイク技術のお披露目だった
誰もぶつからない交通社会実現を目指すホンダ
ホンダが将来に向けた先進安全テクノロジーを構成する具体的な要素技術の数々を、プレス向けに公開・体験させる発表試乗会を行った。前回はホンダの安全に対する考え方や、未来に向けて実現を目指していることの一部をリポートしたが、今回は二輪も含め、そのほかのホンダの先進安全テクノロジーをお届けしたい。
知能化の本命はネットワーク化か
今回、栃木の本田技術研究所で見てきた「知能化運転支援技術」は、じつは車載モジュールの進化と活用によって、クルマ自体が知能化されうる半分、といえるかもしれない。もう半分はネットワーク化、つまりクルマを「安心・安全ネットワーク」内でひとつのノードとして制御する概念の側だ。
 交通状況のネットワーク化によるデータ共有のイメージ画像はこちら
交通状況のネットワーク化によるデータ共有のイメージ画像はこちら
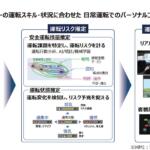
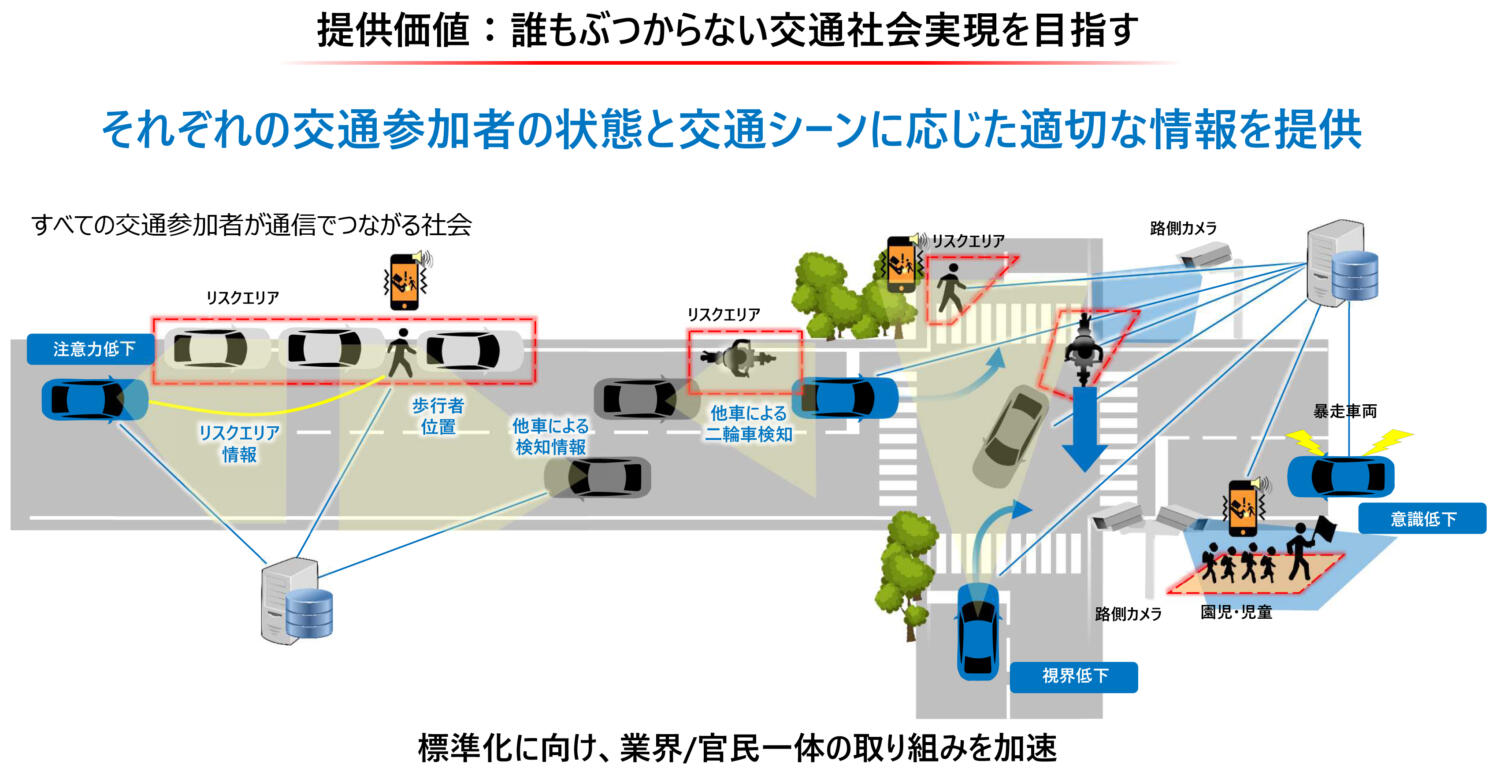
具体的には5G以降の通信環境によって、ドライバーその他あらゆる交通参加者の置かれている状況や周囲環境がシステムで認識され、リスク情報をサーバーに集約共有し、それぞれに導き出された最適な支援情報を配信して回避行動や行動変容を促すという、話だ。ホンダはもっと平たく敷延して、「誰もぶつからない交通社会実現を目指す」としている。
 交通状況のネットワーク化によるデータ共有の体験イメージ画像はこちら
交通状況のネットワーク化によるデータ共有の体験イメージ画像はこちら
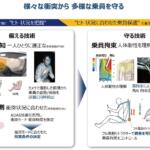
これは単にクルマ同士、歩行者や自転車のスマートフォン同士が繋げられるという話ではない。むしろ対歩行者事故、V2P(ヴィークル・トゥ・パーソン)のケースを抑制するためのシステムづくりといえる。
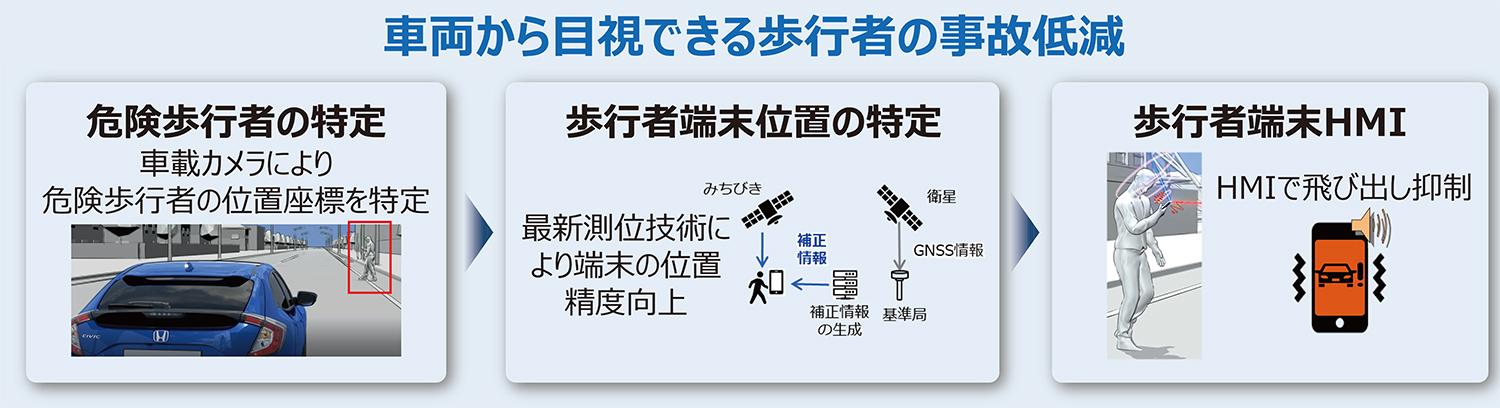 対歩行者事故を抑制するための施策イメージ画像はこちら
対歩行者事故を抑制するための施策イメージ画像はこちら
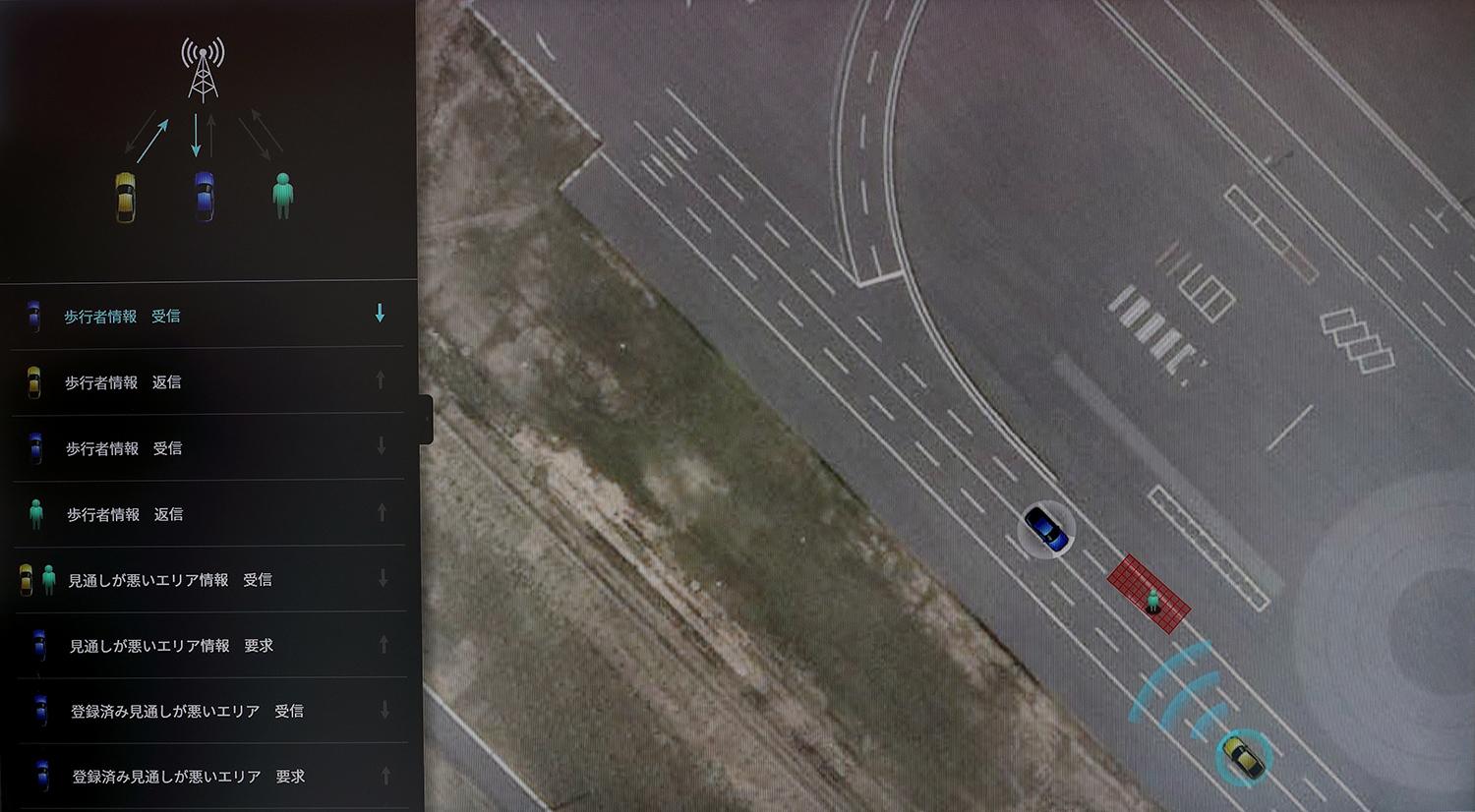
たとえば、ながらスマホで車道を渡ろうとしている歩行者のようなリスクを、車載カメラが特定したら、サーバーを介して必要であれば歩行者側のスマートフォンに支援情報が受信される。そうした状況が駐車したトラックなどによって作り出されているようであれば、見通しが一時的に悪いエリアとして仮想空間内の高精細マップ上に動的データとして書き込まれ、サーバー上で共有されるリスク情報としてそこを通過する他車にも活用される。
 歩行者に危険を知らせる支援情報のイメージ画像はこちら
歩行者に危険を知らせる支援情報のイメージ画像はこちら
これは他車が認識したリスク情報を、自車が受け取ることもできるという、相互やり取りでもある。
ホンダはこのタイプのリスク管理を「協調型リスクHMI(ヒューマン・マシン・インターフェイス)」と呼ぶ。仮想空間内に交通環境を再現することが大前提で、その運用には車載カメラの他にも、路側カメラや個々のスマートフォンの位置情報が要るため、官公庁や通信業界と一体になって取り組むべきものとしている。
 交通状況のネットワーク化によるデータ共有のイメージ画像はこちら
交通状況のネットワーク化によるデータ共有のイメージ画像はこちら
今のところロードマップとして、2020年代前半にシステム構築と効果検証、同後半には標準化と実装を予定しているという。
来年そして2030年までの進化とは
先行技術のデモ体験が主だったこの日の試乗で、直近の市販プロダクトに関係するのは、ホンダ・センシングの機能拡張だ。
 市販されているホンダ車でのホンダ・センシング体験試乗画像はこちら
市販されているホンダ車でのホンダ・センシング体験試乗画像はこちら
具体的には路外逸脱抑制が低速時にも対応し、衝突軽減ブレーキの作動シーンとして二輪車検知率を向上させた。試乗車のシビックで、クルーズコントロールを30km/hに固定し、左側の路肩へわざとフラついてみる。白線がなくても路面と路肩を認識して、修正舵が効く。田舎の一般道などでありうる状況ではある。
 ホンダ・センシングによる車線逸脱抑制機能のイメージ画像はこちら
ホンダ・センシングによる車線逸脱抑制機能のイメージ画像はこちら
次はわざとダミーの二輪車に追突する勢いで進んでいくと、表面積が小さく検知されにくい二輪車を、レーダーがキチンと検知して回避ブレーキが作動した。地味なようだが、日常で頻繁に起こりうるケースをカバーした改良といえるだろう。
 ホンダ・センシングによる二輪車検知と衝突被害軽減ブレーキのイメージ画像はこちら
ホンダ・センシングによる二輪車検知と衝突被害軽減ブレーキのイメージ画像はこちら
続いては「ホンダ・センシング360」、2030年にホンダ全車で標準装備を予定しているADASパッケージの機能のごく一部を、助手席から体験できた。
 ホンダ・センシング360の体験試乗イメージ画像はこちら
ホンダ・センシング360の体験試乗イメージ画像はこちら
最初は、50km/hで前走車に続いて走行車線を走る。前走車が急に車線変更すると、駐車車両があった、という状況だ。かなり近い距離から相対的に高い速度で緊急回避ブレーキが作動したのだが、止まり切るより何より、意外なほどジェントルな制動マナーに驚かされた。
 ホンダ・センシング360による危険回避のイメージ画像はこちら
ホンダ・センシング360による危険回避のイメージ画像はこちら
次はさまざまなパターンと相手による出会い頭事故のエクササイズ3種。横断歩道における歩行者、一時停止から幹線道路に出る際の、80km/hで目の前を横切る四輪と二輪、それぞれのパターンを試した。
 ホンダ・センシング360による危険回避のイメージ画像はこちら
ホンダ・センシング360による危険回避のイメージ画像はこちら
大きさも速度も違えど、いずれもほぼ真横に近い角度から飛び出してきて、対車両とバイクについては左右の見通しが効かない分、こちらがノーズを出せば即衝突というパターン。側方で距離も相当あるはずだが、補助ブレーキが自車を正確にその場に抑えつける。
 ホンダ・センシング360による危険回避時のドライバーへの通知イメージのイメージ画像はこちら
ホンダ・センシング360による危険回避時のドライバーへの通知イメージのイメージ画像はこちら
「加害者になりたくない」という要望に、見事に応える作動ぶりだった。