ランエボではあえてアンダーステアになるよう設定されていた
三菱のランサーエボリューションで言えば第一世代のランエボI~IIIまではセンターデフを持ちながらもアンダーステアになるような設定をしていた。一般道ではタイヤがグリップ限界を超えたときにアンダーステアになるほうが安全という誤った考え方が浸透していて、4WD車のアンダーステアを無理して修正する必要はないと考えられたからだ。
 4WDスポーツ画像はこちら
4WDスポーツ画像はこちら
この考え方は、後輪2輪駆動が主だった時代にパワーオンするとテールハッピーになりスピンして危険という事態を回避するために意図的にアンダーステアに仕立てていた時代の考え方であり、大パワー車の直進性を確保するのに躍起となっていたアメリカ車の技術的由来の名残りとも言える。
一方欧州の考え方はリヤのパワースライドをコントロールすることが重要と考えられ、BMWやポルシェなど後輪駆動のパワースライドコントロール性を重要視したクルマ作りに徹してきていた。これはAWD時代の現代でも引き継がれており、冒頭に期したスーパースポーツのAWDモデルもアンダーステアを回避するセッティングに注力しているのだ。
 4WDスポーツ画像はこちらランエボはⅣの世代にAYC(アクティブヨーコントロール)を採用し、アンダーステアと向き合う技術的アプローチを開始している。だが、その制御範囲はまだまだ狭くパワーオン時のプッシュアンダーステアを完全に回避する領域には達していなかった。
4WDスポーツ画像はこちらランエボはⅣの世代にAYC(アクティブヨーコントロール)を採用し、アンダーステアと向き合う技術的アプローチを開始している。だが、その制御範囲はまだまだ狭くパワーオン時のプッシュアンダーステアを完全に回避する領域には達していなかった。
 4WDスポーツ画像はこちら
4WDスポーツ画像はこちら
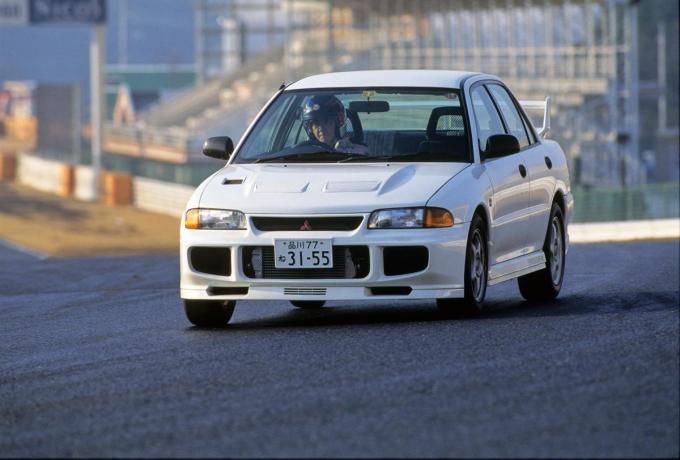
国産4WDモデルとして画期的なハンドリングを実現したのはエボV RSだった。エボV RSはまだ電子制御のAYCやACD(アクティブセンターデフ)を採用していなかったが、前後のデフにLSD(リミテッドスリップデフ)を採用。フロントはトルセン(トルクセンシング)方式、リヤはメカニカル方式のLSDで構成して劇的なハンドリングの向上を果たしていたのだ。センターデフは前50:後50の固定駆動力配分で、アウディ・クワトロと同様だ。
だが4WDでアンダーステアを弱めると本来の持ち味であるはずのトラクション(駆動力)性能に影響してしまう。旋回加速など過渡的な運転状況でセンターデフの作動差が機能して有効輪に駆動力が伝わらなくなるぶん、旋回力が活きてアンダーステアが弱まるのだった。
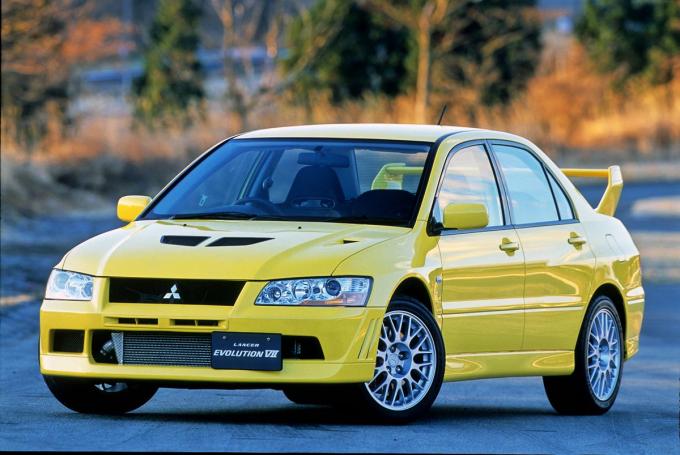
そこでエボVIIではACDを採用し、センターデフのロッキングを運転状況に応じて可変とし旋回力と駆動力のバランスを効果的に変動させたのである。
 4WDスポーツ画像はこちら
4WDスポーツ画像はこちら
三菱が得意としたAWDの制御技術はWRC(世界ラリー選手権)で培われたもので、トミ・マキネン(フィンランド)により1996年から1999年にかけて世界選手権4連覇を果たした。その最終モデルは前後及びセンターデフを電子制御で可変とし、完全ロックから完全フリーまでをコントロールできる。このマシンで試走したことがあるが、そのハンドリングは「完璧」と言えるものだった。
 4WDスポーツ画像はこちら
4WDスポーツ画像はこちら
ドライバーが曲がりたいと思ってステアリング操作すれば望むどおりの旋回ヨーが立ち上がり、ステアリングを直進に保てば強力なトラクションが発揮されて4輪パワードリフト姿勢も自在に操れる。この電子制御が可能ならミッドシップである必要もない。
現代なら4輪操舵も装着され、さらに自在にハンドリングを設定できるようになっている。AMGもランボルギーニもポルシェもAWDにAWS(オールホイールステア)を既に装着しているのだ。また近い将来には前後左右完全駆動力配分も可能となってAWDでなければスポーツカーと名乗れない時代がすぐそこまで来ている。































